|
JSBSim Flight Dynamics Model 1.3.1 (17 May 2026)
An Open Source Flight Dynamics and Control Software Library in C++
|
|
JSBSim Flight Dynamics Model 1.3.1 (17 May 2026)
An Open Source Flight Dynamics and Control Software Library in C++
|
Encapsulates various uncategorized scheduled functions.
Pilot sensed accelerations are calculated here. This is used for the coordinated turn ball instrument. Motion base platforms sometimes use the derivative of pilot sensed accelerations as the driving parameter, rather than straight accelerations.
The theory behind pilot-sensed calculations is presented:
For purposes of discussion and calculation, assume for a minute that the pilot is in space and motionless in inertial space. She will feel no accelerations. If the aircraft begins to accelerate along any axis or axes (without rotating), the pilot will sense those accelerations. If any rotational moment is applied, the pilot will sense an acceleration due to that motion in the amount:
[wdot X R] + [w X (w X R)] Term I Term II
where:
wdot = omegadot, the rotational acceleration rate vector w = omega, the rotational rate vector R = the vector from the aircraft CG to the pilot eyepoint
The sum total of these two terms plus the acceleration of the aircraft body axis gives the acceleration the pilot senses in inertial space. In the presence of a large body such as a planet, a gravity field also provides an accelerating attraction. This acceleration can be transformed from the reference frame of the planet so as to be expressed in the frame of reference of the aircraft. This gravity field accelerating attraction is felt by the pilot as a force on her tushie as she sits in her aircraft on the runway awaiting takeoff clearance.
In JSBSim the acceleration of the body frame in inertial space is given by the F = ma relation. If the vForces vector is divided by the aircraft mass, the acceleration vector is calculated. The term wdot is equivalent to the JSBSim vPQRdot vector, and the w parameter is equivalent to vPQR.
Definition at line 102 of file FGAuxiliary.h.
#include <FGAuxiliary.h>
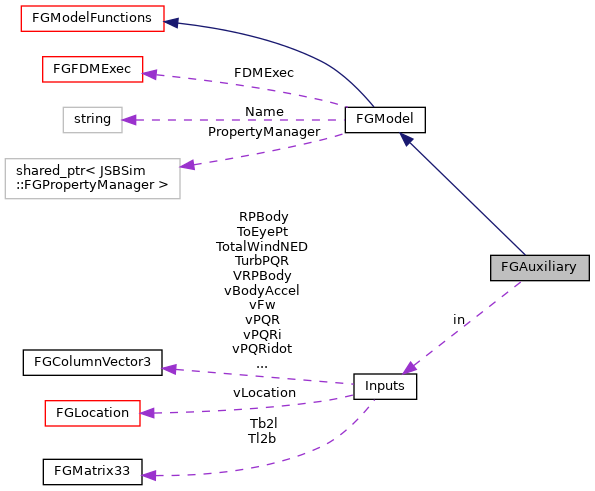
 Inheritance diagram for FGAuxiliary: Collaboration diagram for FGAuxiliary:
Inheritance diagram for FGAuxiliary: Collaboration diagram for FGAuxiliary:Classes | |
| struct | Inputs |
Public Member Functions | |
| FGAuxiliary (FGFDMExec *Executive) | |
| Constructor. | |
| ~FGAuxiliary () | |
| Destructor. | |
| double | Getadot (int unit) const |
| double | Getadot (void) const |
| double | GetAeroPQR (int axis) const |
| const FGColumnVector3 & | GetAeroPQR (void) const |
| double | GetAeroUVW (int idx) const |
| const FGColumnVector3 & | GetAeroUVW (void) const |
| double | Getalpha (int unit) const |
| double | Getalpha (void) const |
| double | Getbdot (int unit) const |
| double | Getbdot (void) const |
| double | Getbeta (int unit) const |
| double | Getbeta (void) const |
| double | GetDistanceRelativePosition (void) const |
| double | GetEulerRates (int axis) const |
| const FGColumnVector3 & | GetEulerRates (void) const |
| double | GetGamma (int unit) const |
| double | GetGamma (void) const |
| double | GetGroundTrack (void) const |
| double | GetHOverBCG (void) const |
| double | GetHOverBMAC (void) const |
| double | GetLatitudeRelativePosition (void) const |
| const FGLocation & | GetLocationVRP (void) const |
| double | GetLongitudeRelativePosition (void) const |
| double | GetMach (void) const |
| Gets the Mach number. | |
| double | GetMachU (void) const |
| The mach number calculated using the vehicle X axis velocity. | |
| double | GetMagBeta (int unit) const |
| double | GetMagBeta (void) const |
| double | GetNcg (int idx) const |
| const FGColumnVector3 & | GetNcg (void) const |
| const FGColumnVector3 & | GetNEUPositionFromStart () const |
| double | GetNEUPositionFromStart (int idx) const |
| The North East Up (NEU) frame is a local tangential frame fixed in the ECEF frame (i.e following the Earth's rotation). | |
| double | GetNlf (void) const |
| double | GetNpilot (int idx) const |
| const FGColumnVector3 & | GetNpilot (void) const |
| const FGColumnVector3 & | GetNwcg (void) const |
| double | GetNx (void) const |
| The longitudinal acceleration in g's of the aircraft center of gravity. | |
| double | GetNy (void) const |
| The lateral acceleration in g's of the aircraft center of gravity. | |
| double | GetNz (void) const |
| The vertical acceleration in g's of the aircraft center of gravity. | |
| double | GetPilotAccel (int idx) const |
| const FGColumnVector3 & | GetPilotAccel (void) const |
| double | Getqbar (void) const |
| double | GetqbarUV (void) const |
| double | GetqbarUW (void) const |
| double | GetReynoldsNumber (void) const |
| double | GetTAT_C (void) const |
| const FGMatrix33 & | GetTb2w (void) const |
| Calculates and returns the body-to-wind axis transformation matrix. | |
| double | GetTotalPressure (void) const |
| Returns the total pressure. | |
| double | GetTotalTemperature (void) const |
| Returns the total temperature. | |
| const FGMatrix33 & | GetTw2b (void) const |
| Calculates and returns the wind-to-body axis transformation matrix. | |
| double | GetVcalibratedFPS (void) const |
| Returns Calibrated airspeed in feet/second. | |
| double | GetVcalibratedKTS (void) const |
| Returns Calibrated airspeed in knots. | |
| double | GetVequivalentFPS (void) const |
| Returns equivalent airspeed in feet/second. | |
| double | GetVequivalentKTS (void) const |
| Returns equivalent airspeed in knots. | |
| double | GetVground (void) const |
| Gets the ground speed in feet per second. | |
| double | GetVt (void) const |
| Gets the magnitude of total vehicle velocity including wind effects in feet per second. | |
| double | GetVtrueFPS () const |
| Returns the true airspeed in feet per second. | |
| double | GetVtrueKTS () const |
| Returns the true airspeed in knots. | |
| bool | InitModel (void) override |
| double | MachFromImpactPressure (double qc, double p) const |
| Compute the Mach number from the differential pressure (qc) and the static pressure. | |
| double | MachFromVcalibrated (double vcas, double pressure) const |
| Calculate the Mach number from the calibrated airspeed.Based on the formulas in the US Air Force Aircraft Performance Flight Testing Manual (AFFTC-TIH-99-01). | |
| double | PitotTotalPressure (double mach, double pressure) const |
| Compute the total pressure in front of the Pitot tube. | |
| bool | Run (bool Holding) override |
| Runs the Auxiliary routines; called by the Executive Can pass in a value indicating if the executive is directing the simulation to Hold. | |
| void | SetAeroPQR (const FGColumnVector3 &tt) |
| void | SetInitialState (const FGInitialCondition *) |
| double | VcalibratedFromMach (double mach, double pressure) const |
| Calculate the calibrated airspeed from the Mach number. | |
| Public Member Functions inherited from FGModel | |
| FGModel (FGFDMExec *) | |
| Constructor. | |
| ~FGModel () override | |
| Destructor. | |
| virtual SGPath | FindFullPathName (const SGPath &path) const |
| FGFDMExec * | GetExec (void) const |
| const std::string & | GetName (void) const |
| unsigned int | GetRate (void) const |
| Get the output rate for the model in frames. | |
| bool | InitModel (void) override |
| virtual bool | Load (Element *el) |
| void | SetPropertyManager (std::shared_ptr< FGPropertyManager > fgpm) |
| void | SetRate (unsigned int tt) |
| Set the ouput rate for the model in frames. | |
| Public Member Functions inherited from FGModelFunctions | |
| std::string | GetFunctionStrings (const std::string &delimeter) const |
| Gets the strings for the current set of functions. | |
| std::string | GetFunctionValues (const std::string &delimeter) const |
| Gets the function values. | |
| std::shared_ptr< FGFunction > | GetPreFunction (const std::string &name) |
| Get one of the "pre" function. | |
| bool | Load (Element *el, FGFDMExec *fdmex, std::string prefix="") |
| void | PostLoad (Element *el, FGFDMExec *fdmex, std::string prefix="") |
| void | PreLoad (Element *el, FGFDMExec *fdmex, std::string prefix="") |
| void | RunPostFunctions (void) |
| void | RunPreFunctions (void) |
| Public Member Functions inherited from FGJSBBase | |
| FGJSBBase () | |
| Constructor for FGJSBBase. | |
| virtual | ~FGJSBBase () |
| Destructor for FGJSBBase. | |
| void | disableHighLighting (void) |
| Disables highlighting in the console output. | |
Public Attributes | |
| struct JSBSim::FGAuxiliary::Inputs | in |
Additional Inherited Members | |
| Public Types inherited from FGJSBBase | |
| enum | { eL = 1 , eM , eN } |
| Moments L, M, N. More... | |
| enum | { eP = 1 , eQ , eR } |
| Rates P, Q, R. More... | |
| enum | { eU = 1 , eV , eW } |
| Velocities U, V, W. More... | |
| enum | { eX = 1 , eY , eZ } |
| Positions X, Y, Z. More... | |
| enum | { ePhi = 1 , eTht , ePsi } |
| Euler angles Phi, Theta, Psi. More... | |
| enum | { eDrag = 1 , eSide , eLift } |
| Stability axis forces, Drag, Side force, Lift. More... | |
| enum | { eRoll = 1 , ePitch , eYaw } |
| Local frame orientation Roll, Pitch, Yaw. More... | |
| enum | { eNorth = 1 , eEast , eDown } |
| Local frame position North, East, Down. More... | |
| enum | { eLat = 1 , eLong , eRad } |
| Locations Radius, Latitude, Longitude. More... | |
| enum | { inNone = 0 , inDegrees , inRadians , inMeters , inFeet } |
| Conversion specifiers. More... | |
| Static Public Member Functions inherited from FGJSBBase | |
| static const std::string & | GetVersion (void) |
| Returns the version number of JSBSim. | |
| static constexpr double | KelvinToFahrenheit (double kelvin) |
| Converts from degrees Kelvin to degrees Fahrenheit. | |
| static constexpr double | CelsiusToRankine (double celsius) |
| Converts from degrees Celsius to degrees Rankine. | |
| static constexpr double | RankineToCelsius (double rankine) |
| Converts from degrees Rankine to degrees Celsius. | |
| static constexpr double | KelvinToRankine (double kelvin) |
| Converts from degrees Kelvin to degrees Rankine. | |
| static constexpr double | RankineToKelvin (double rankine) |
| Converts from degrees Rankine to degrees Kelvin. | |
| static constexpr double | FahrenheitToCelsius (double fahrenheit) |
| Converts from degrees Fahrenheit to degrees Celsius. | |
| static constexpr double | CelsiusToFahrenheit (double celsius) |
| Converts from degrees Celsius to degrees Fahrenheit. | |
| static constexpr double | CelsiusToKelvin (double celsius) |
| Converts from degrees Celsius to degrees Kelvin. | |
| static constexpr double | KelvinToCelsius (double kelvin) |
| Converts from degrees Kelvin to degrees Celsius. | |
| static constexpr double | FeetToMeters (double measure) |
| Converts from feet to meters. | |
| static bool | EqualToRoundoff (double a, double b) |
| Finite precision comparison. | |
| static bool | EqualToRoundoff (float a, float b) |
| Finite precision comparison. | |
| static bool | EqualToRoundoff (float a, double b) |
| Finite precision comparison. | |
| static bool | EqualToRoundoff (double a, float b) |
| Finite precision comparison. | |
| static constexpr double | Constrain (double min, double value, double max) |
| Constrain a value between a minimum and a maximum value. | |
| static constexpr double | sign (double num) |
| Static Public Attributes inherited from FGJSBBase | |
| static char | highint [5] = {27, '[', '1', 'm', '\0' } |
| highlights text | |
| static char | halfint [5] = {27, '[', '2', 'm', '\0' } |
| low intensity text | |
| static char | normint [6] = {27, '[', '2', '2', 'm', '\0' } |
| normal intensity text | |
| static char | reset [5] = {27, '[', '0', 'm', '\0' } |
| resets text properties | |
| static char | underon [5] = {27, '[', '4', 'm', '\0' } |
| underlines text | |
| static char | underoff [6] = {27, '[', '2', '4', 'm', '\0' } |
| underline off | |
| static char | fgblue [6] = {27, '[', '3', '4', 'm', '\0' } |
| blue text | |
| static char | fgcyan [6] = {27, '[', '3', '6', 'm', '\0' } |
| cyan text | |
| static char | fgred [6] = {27, '[', '3', '1', 'm', '\0' } |
| red text | |
| static char | fggreen [6] = {27, '[', '3', '2', 'm', '\0' } |
| green text | |
| static char | fgdef [6] = {27, '[', '3', '9', 'm', '\0' } |
| default text | |
| static short | debug_lvl = 1 |
| Protected Member Functions inherited from FGModel | |
| bool | Upload (Element *el, bool preLoad) |
| Uploads this model in memory. | |
| Static Protected Member Functions inherited from FGJSBBase | |
| static std::string | CreateIndexedPropertyName (const std::string &Property, int index) |
| Protected Attributes inherited from FGModel | |
| unsigned int | exe_ctr |
| FGFDMExec * | FDMExec |
| std::string | Name |
| std::shared_ptr< FGPropertyManager > | PropertyManager |
| unsigned int | rate |
| Protected Attributes inherited from FGModelFunctions | |
| FGPropertyReader | LocalProperties |
| std::vector< std::shared_ptr< FGFunction > > | PostFunctions |
| std::vector< std::shared_ptr< FGFunction > > | PreFunctions |
| Static Protected Attributes inherited from FGJSBBase | |
| static constexpr double | radtodeg = 180. / M_PI |
| static constexpr double | degtorad = M_PI / 180. |
| static constexpr double | hptoftlbssec = 550.0 |
| static constexpr double | psftoinhg = 0.014138 |
| static constexpr double | psftopa = 47.88 |
| static constexpr double | fttom = 0.3048 |
| static constexpr double | ktstofps = 1852./(3600*fttom) |
| static constexpr double | fpstokts = 1.0 / ktstofps |
| static constexpr double | inchtoft = 1.0/12.0 |
| static constexpr double | m3toft3 = 1.0/(fttom*fttom*fttom) |
| static constexpr double | in3tom3 = inchtoft*inchtoft*inchtoft/m3toft3 |
| static constexpr double | inhgtopa = 3386.38 |
| static constexpr double | slugtolb = 32.174049 |
| Note that definition of lbtoslug by the inverse of slugtolb and not to a different constant you can also get from some tables will make lbtoslug*slugtolb == 1 up to the magnitude of roundoff. | |
| static constexpr double | lbtoslug = 1.0/slugtolb |
| static constexpr double | kgtolb = 2.20462 |
| static constexpr double | kgtoslug = 0.06852168 |
| static const std::string | needed_cfg_version = "2.0" |
| static const std::string | JSBSim_version = JSBSIM_VERSION " " __DATE__ " " __TIME__ |
|
explicit |
Constructor.
| Executive | a pointer to the parent executive object |
Definition at line 62 of file FGAuxiliary.cpp.
Here is the call graph for this function:| ~FGAuxiliary | ( | ) |
|
inline |
Definition at line 217 of file FGAuxiliary.h.
|
inline |
Definition at line 209 of file FGAuxiliary.h.
|
inline |
Definition at line 193 of file FGAuxiliary.h.
|
inline |
Definition at line 201 of file FGAuxiliary.h.
|
inline |
Definition at line 206 of file FGAuxiliary.h.
|
inline |
Definition at line 203 of file FGAuxiliary.h.
|
inline |
Definition at line 213 of file FGAuxiliary.h.
|
inline |
Definition at line 207 of file FGAuxiliary.h.
|
inline |
Definition at line 219 of file FGAuxiliary.h.
|
inline |
Definition at line 210 of file FGAuxiliary.h.
|
inline |
Definition at line 215 of file FGAuxiliary.h.
|
inline |
Definition at line 208 of file FGAuxiliary.h.
| double GetDistanceRelativePosition | ( | void | ) | const |
Definition at line 384 of file FGAuxiliary.cpp.
|
inline |
Definition at line 194 of file FGAuxiliary.h.
|
inline |
Definition at line 202 of file FGAuxiliary.h.
|
inline |
Definition at line 272 of file FGAuxiliary.h.
|
inline |
Definition at line 269 of file FGAuxiliary.h.
|
inline |
Definition at line 270 of file FGAuxiliary.h.
|
inline |
Definition at line 266 of file FGAuxiliary.h.
|
inline |
Definition at line 267 of file FGAuxiliary.h.
| double GetLatitudeRelativePosition | ( | void | ) | const |
Definition at line 376 of file FGAuxiliary.cpp.
|
inline |
Definition at line 204 of file FGAuxiliary.h.
| double GetLongitudeRelativePosition | ( | void | ) | const |
Definition at line 368 of file FGAuxiliary.cpp.
|
inline |
|
inline |
The mach number calculated using the vehicle X axis velocity.
Definition at line 253 of file FGAuxiliary.h.
|
inline |
Definition at line 221 of file FGAuxiliary.h.
|
inline |
Definition at line 211 of file FGAuxiliary.h.
|
inline |
Definition at line 199 of file FGAuxiliary.h.
|
inline |
Definition at line 198 of file FGAuxiliary.h.
| const FGColumnVector3 & GetNEUPositionFromStart | ( | ) | const |
Definition at line 393 of file FGAuxiliary.cpp.
|
inline |
The North East Up (NEU) frame is a local tangential frame fixed in the ECEF frame (i.e following the Earth's rotation).
The NEU frame's origin is fixed at the aircrat's initial lat, lon position and at an altitude of 0 ft relative to the reference ellipsoid. The NEU frame is a left-handed coordinate system, unlike the NED frame. So beware of differences when computing cross products.
Definition at line 289 of file FGAuxiliary.h.
Here is the call graph for this function: Here is the caller graph for this function:| double GetNlf | ( | void | ) | const |
Definition at line 358 of file FGAuxiliary.cpp.
|
inline |
Definition at line 192 of file FGAuxiliary.h.
|
inline |
Definition at line 197 of file FGAuxiliary.h.
|
inline |
Definition at line 264 of file FGAuxiliary.h.
|
inline |
The longitudinal acceleration in g's of the aircraft center of gravity.
Definition at line 256 of file FGAuxiliary.h.
|
inline |
The lateral acceleration in g's of the aircraft center of gravity.
Definition at line 259 of file FGAuxiliary.h.
|
inline |
The vertical acceleration in g's of the aircraft center of gravity.
Definition at line 262 of file FGAuxiliary.h.
|
inline |
Definition at line 191 of file FGAuxiliary.h.
|
inline |
Definition at line 196 of file FGAuxiliary.h.
|
inline |
Definition at line 234 of file FGAuxiliary.h.
|
inline |
Definition at line 236 of file FGAuxiliary.h.
|
inline |
Definition at line 235 of file FGAuxiliary.h.
|
inline |
Definition at line 237 of file FGAuxiliary.h.
|
inline |
Definition at line 189 of file FGAuxiliary.h.
|
inline |
Calculates and returns the body-to-wind axis transformation matrix.
Definition at line 232 of file FGAuxiliary.h.
|
inline |
Returns the total pressure.
Total pressure is freestream total pressure for subsonic only. For supersonic it is the 1D total pressure behind a normal shock.
Definition at line 178 of file FGAuxiliary.h.
|
inline |
Returns the total temperature.
The total temperature ("tat", isentropic flow) is calculated:
(where "in.Temperature" is standard temperature calculated by the atmosphere model)
Definition at line 188 of file FGAuxiliary.h.
|
inline |
Calculates and returns the wind-to-body axis transformation matrix.
Definition at line 227 of file FGAuxiliary.h.
|
inline |
Returns Calibrated airspeed in feet/second.
Definition at line 162 of file FGAuxiliary.h.
|
inline |
Returns Calibrated airspeed in knots.
Definition at line 164 of file FGAuxiliary.h.
|
inline |
Returns equivalent airspeed in feet/second.
Definition at line 166 of file FGAuxiliary.h.
|
inline |
Returns equivalent airspeed in knots.
Definition at line 168 of file FGAuxiliary.h.
|
inline |
Gets the ground speed in feet per second.
The magnitude is the square root of the sum of the squares (RSS) of the vehicle north and east velocity components.
Definition at line 247 of file FGAuxiliary.h.
|
inline |
Gets the magnitude of total vehicle velocity including wind effects in feet per second.
Definition at line 241 of file FGAuxiliary.h.
|
inline |
Returns the true airspeed in feet per second.
Definition at line 170 of file FGAuxiliary.h.
|
inline |
Returns the true airspeed in knots.
Definition at line 172 of file FGAuxiliary.h.
|
overridevirtual |
Reimplemented from FGModelFunctions.
Definition at line 96 of file FGAuxiliary.cpp.
| double MachFromImpactPressure | ( | double | qc, |
| double | p | ||
| ) | const |
Compute the Mach number from the differential pressure (qc) and the static pressure.
Based on the formulas in the US Air Force Aircraft Performance Flight Testing Manual (AFFTC-TIH-99-01).
| qc | The differential/impact pressure |
| pressure | Pressure in psf |
Definition at line 281 of file FGAuxiliary.cpp.
Here is the caller graph for this function:| double MachFromVcalibrated | ( | double | vcas, |
| double | pressure | ||
| ) | const |
Calculate the Mach number from the calibrated airspeed.Based on the formulas in the US Air Force Aircraft Performance Flight Testing Manual (AFFTC-TIH-99-01).
| vcas | The calibrated airspeed (CAS) in ft/s |
| pressure | Pressure in psf |
Definition at line 311 of file FGAuxiliary.cpp.
Here is the call graph for this function:| double PitotTotalPressure | ( | double | mach, |
| double | pressure | ||
| ) | const |
Compute the total pressure in front of the Pitot tube.
It uses the Rayleigh formula for supersonic speeds (See "Introduction to Aerodynamics of a Compressible Fluid - H.W. Liepmann, A.E. Puckett - Wiley & sons (1947)" §5.4 pp 75-80)
| mach | The Mach number |
| pressure | Pressure in psf |
Definition at line 244 of file FGAuxiliary.cpp.
Here is the caller graph for this function:
|
overridevirtual |
Runs the Auxiliary routines; called by the Executive Can pass in a value indicating if the executive is directing the simulation to Hold.
| Holding | if true, the executive has been directed to hold the sim from advancing time. Some models may ignore this flag, such as the Input model, which may need to be active to listen on a socket for the "Resume" command to be given. |
Reimplemented from FGModel.
Definition at line 144 of file FGAuxiliary.cpp.
Here is the call graph for this function:
|
inline |
Definition at line 292 of file FGAuxiliary.h.
| void SetInitialState | ( | const FGInitialCondition * | ic | ) |
Definition at line 129 of file FGAuxiliary.cpp.
| double VcalibratedFromMach | ( | double | mach, |
| double | pressure | ||
| ) | const |
Calculate the calibrated airspeed from the Mach number.
Based on the formulas in the US Air Force Aircraft Performance Flight Testing Manual (AFFTC-TIH-99-01).
| mach | The Mach number |
| pressure | Pressure in psf |
Definition at line 303 of file FGAuxiliary.cpp.
Here is the call graph for this function: Here is the caller graph for this function: