|
JSBSim Flight Dynamics Model 1.3.1 (17 May 2026)
An Open Source Flight Dynamics and Control Software Library in C++
|
|
JSBSim Flight Dynamics Model 1.3.1 (17 May 2026)
An Open Source Flight Dynamics and Control Software Library in C++
|
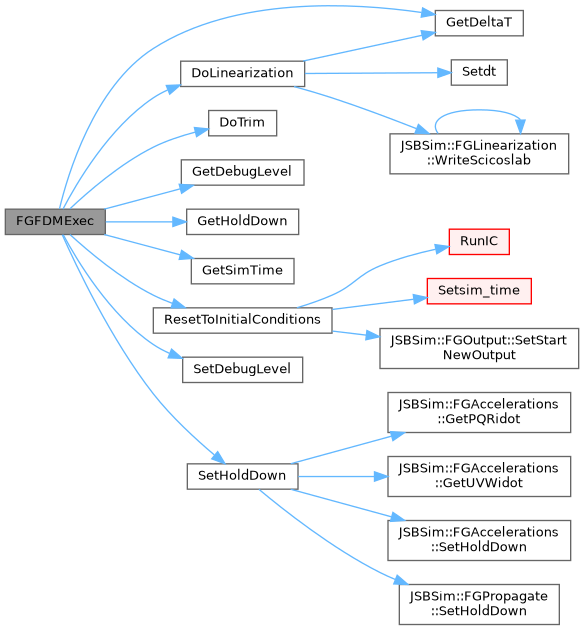
Encapsulates the JSBSim simulation executive.
This class is the executive class through which all other simulation classes are instantiated, initialized, and run. When integrated with FlightGear (or other flight simulator) this class is typically instantiated by an interface class on the simulator side.
At the time of simulation initialization, the interface class creates an instance of this executive class. The executive is subsequently directed to load the chosen aircraft specification file:
When an aircraft model is loaded, the config file is parsed and for each of the sections of the config file (propulsion, flight control, etc.) the corresponding Load() method is called (e.g. FGFCS::Load()).
Subsequent to the creation of the executive and loading of the model, initialization is performed. Initialization involves copying control inputs into the appropriate JSBSim data storage locations, configuring it for the set of user supplied initial conditions, and then copying state variables from JSBSim. The state variables are used to drive the instrument displays and to place the vehicle model in world space for visual rendering:
Once initialization is complete, cyclic execution proceeds:
JSBSim can be used in a standalone mode by creating a compact stub program that effectively performs the same progression of steps as outlined above for the integrated version, but with two exceptions. First, the copy_to_JSBSim() and copy_from_JSBSim() functions are not used because the control inputs are handled directly by the scripting facilities and outputs are handled by the output (data logging) class. Second, the name of a script file can be supplied to the stub program. Scripting (see FGScript) provides a way to supply command inputs to the simulation:
The standalone mode has been useful for verifying changes before committing updates to the source code repository. It is also useful for running sets of tests that reveal some aspects of simulated aircraft performance, such as range, time-to-climb, takeoff distance, etc.
This describes to any interested entity the debug level requested by setting the JSBSIM_DEBUG environment variable. The bitmasked value choices are as follows:
Definition at line 184 of file FGFDMExec.h.
#include <FGFDMExec.h>
 Inheritance diagram for FGFDMExec: Collaboration diagram for FGFDMExec:
Inheritance diagram for FGFDMExec: Collaboration diagram for FGFDMExec:Classes | |
| struct | PropertyCatalogStructure |
Public Types | |
| enum | eModels { ePropagate =0 , eInput , eInertial , eAtmosphere , eWinds , eSystems , eMassBalance , eAuxiliary , ePropulsion , eAerodynamics , eGroundReactions , eExternalReactions , eBuoyantForces , eAircraft , eAccelerations , eOutput , eNumStandardModels } |
| Public Types inherited from FGJSBBase | |
| enum | { eL = 1 , eM , eN } |
| Moments L, M, N. More... | |
| enum | { eP = 1 , eQ , eR } |
| Rates P, Q, R. More... | |
| enum | { eU = 1 , eV , eW } |
| Velocities U, V, W. More... | |
| enum | { eX = 1 , eY , eZ } |
| Positions X, Y, Z. More... | |
| enum | { ePhi = 1 , eTht , ePsi } |
| Euler angles Phi, Theta, Psi. More... | |
| enum | { eDrag = 1 , eSide , eLift } |
| Stability axis forces, Drag, Side force, Lift. More... | |
| enum | { eRoll = 1 , ePitch , eYaw } |
| Local frame orientation Roll, Pitch, Yaw. More... | |
| enum | { eNorth = 1 , eEast , eDown } |
| Local frame position North, East, Down. More... | |
| enum | { eLat = 1 , eLong , eRad } |
| Locations Radius, Latitude, Longitude. More... | |
| enum | { inNone = 0 , inDegrees , inRadians , inMeters , inFeet } |
| Conversion specifiers. More... | |
Public Member Functions | |
| FGFDMExec (FGPropertyManager *root=nullptr, std::shared_ptr< unsigned int > fdmctr=nullptr) | |
| Default constructor. | |
| ~FGFDMExec () | |
| Default destructor. | |
| void | AddTemplateFunc (const std::string &name, Element *el) |
| void | BuildPropertyCatalog (struct PropertyCatalogStructure *pcs) |
| Builds a catalog of properties. | |
| void | CheckIncrementalHold (void) |
| Checks if required to hold afer increment. | |
| void | DisableInput (void) |
| Disables input from all inputs. | |
| void | DisableOutput (void) |
| Disables data logging to all outputs. | |
| void | DoLinearization (int) |
| Executes linearization with state-space output You must trim first to get an accurate state-space model. | |
| void | DoTrim (int mode) |
| Executes trimming in the selected mode. | |
| void | EnableIncrementThenHold (int Timesteps) |
| Turn on hold after increment. | |
| void | EnableInput (void) |
| Enables input from all inputs. | |
| void | EnableOutput (void) |
| Enables data logging to all outputs. | |
| std::vector< std::string > | EnumerateFDMs (void) |
| Returns a vector of strings representing the names of all loaded models (future) | |
| void | ForceOutput (int idx=0) |
| Forces the specified output object to print its items once. | |
| const SGPath & | GetAircraftPath (void) |
| Retrieves the aircraft path. | |
| auto | GetChildFDM (int i) const |
| Gets a particular child FDM. | |
| int | GetDebugLevel (void) const |
| Retrieves the current debug level setting. | |
| double | GetDeltaT (void) const |
| Returns the simulation delta T. | |
| const SGPath & | GetEnginePath (void) |
| Retrieves the engine path. | |
| size_t | GetFDMCount (void) const |
| Gets the number of child FDMs. | |
| unsigned int | GetFrame (void) const |
| Retrieves the current frame count. | |
| const SGPath & | GetFullAircraftPath (void) |
| Retrieves the full aircraft path name. | |
| bool | GetHoldDown (void) const |
| Gets the value of the property forces/hold-down. | |
| const std::string & | GetModelName (void) const |
| Returns the model name. | |
| std::string | GetOutputFileName (int n) const |
| Retrieves the current output filename. | |
| const SGPath & | GetOutputPath (void) |
| Retrieves the path to the output files. | |
| std::vector< std::string > & | GetPropertyCatalog (void) |
| std::shared_ptr< FGPropertyManager > | GetPropertyManager (void) const |
| Returns a pointer to the property manager object. | |
| double | GetPropertyValue (const std::string &property) |
| Retrieves the value of a property. | |
| std::string | GetPropulsionTankReport () const |
| auto | GetRandomGenerator (void) const |
| const SGPath & | GetRootDir (void) const |
| Retrieve the Root Directory. | |
| double | GetSimTime (void) const |
| Returns the cumulative simulation time in seconds. | |
| const SGPath & | GetSystemsPath (void) |
| Retrieves the systems path. | |
| FGTemplateFunc_ptr | GetTemplateFunc (const std::string &name) |
| int | GetTrimMode (void) const |
| bool | GetTrimStatus (void) const |
| void | Hold (void) |
| Pauses execution by preventing time from incrementing. | |
| bool | Holding (void) |
| Returns true if the simulation is Holding (i.e. simulation time is not moving). | |
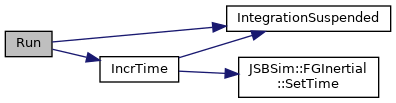
| double | IncrTime (void) |
| Increments the simulation time if not in Holding mode. | |
| void | Initialize (const FGInitialCondition *FGIC) |
| Initializes the simulation with initial conditions. | |
| bool | IntegrationSuspended (void) const |
| Returns the simulation suspension state. | |
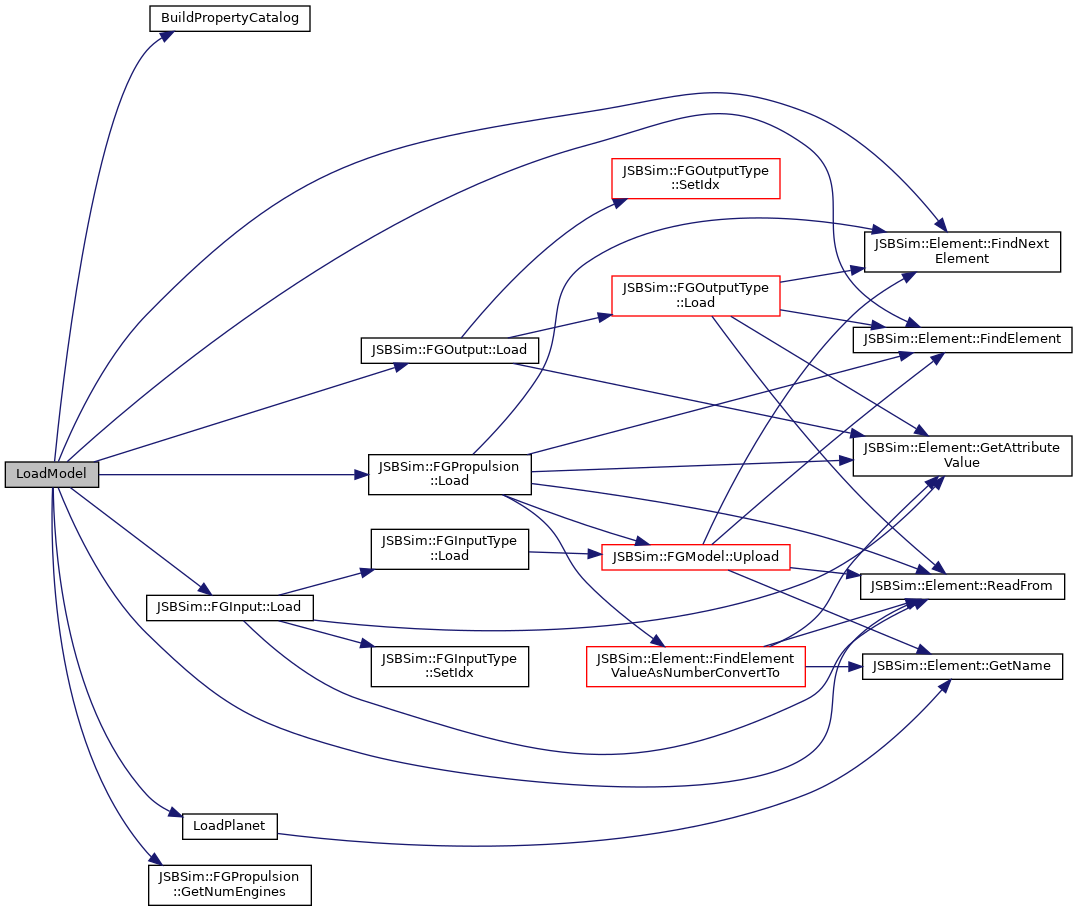
| bool | LoadModel (const SGPath &AircraftPath, const SGPath &EnginePath, const SGPath &SystemsPath, const std::string &model, bool addModelToPath=true) |
| Loads an aircraft model. | |
| bool | LoadModel (const std::string &model, bool addModelToPath=true) |
| Loads an aircraft model. | |
| bool | LoadPlanet (const SGPath &PlanetPath, bool useAircraftPath=true) |
| Loads the planet. | |
| bool | LoadScript (const SGPath &Script, double deltaT=0.0, const SGPath &initfile=SGPath()) |
| Load a script. | |
| void | PrintPropertyCatalog (void) |
| void | PrintSimulationConfiguration (void) const |
| std::string | QueryPropertyCatalog (const std::string &check, const std::string &end_of_line="\n") |
| Retrieves property or properties matching the supplied string. | |
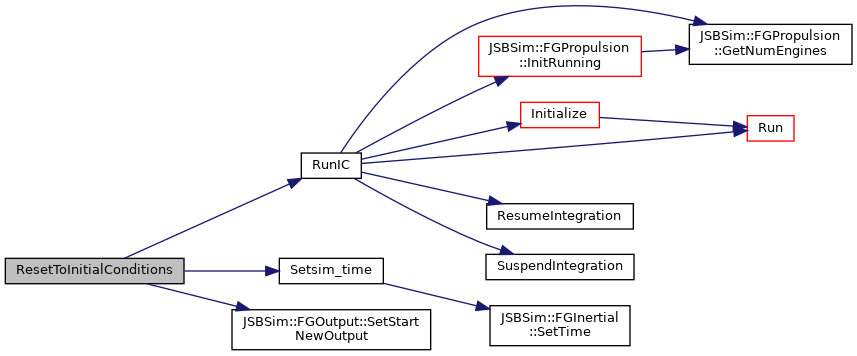
| void | ResetToInitialConditions (int mode) |
| Resets the initial conditions object and prepares the simulation to run again. | |
| void | Resume (void) |
| Resumes execution from a "Hold". | |
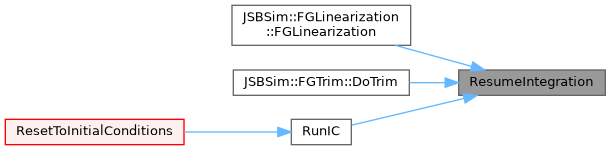
| void | ResumeIntegration (void) |
| Resumes the simulation by resetting delta T to the correct value. | |
| bool | Run (void) |
| This function executes each scheduled model in succession. | |
| bool | RunIC (void) |
| Initializes the sim from the initial condition object and executes each scheduled model without integrating i.e. | |
| bool | SetAircraftPath (const SGPath &path) |
| Set the path to the aircraft config file directories. | |
| void | SetChild (bool ch) |
| Marks this instance of the Exec object as a "child" object. | |
| void | SetDebugLevel (int level) |
| Sets the debug level. | |
| void | Setdt (double delta_t) |
| Sets the integration time step for the simulation executive. | |
| bool | SetEnginePath (const SGPath &path) |
| Set the path to the engine config file directories. | |
| void | SetHoldDown (bool hd) |
| Sets the property forces/hold-down. | |
| void | SetLoggingRate (double rate) |
| Sets the logging rate in Hz for all output objects (if any). | |
| bool | SetOutputDirectives (const SGPath &fname) |
| Sets the output (logging) mechanism for this run. | |
| bool | SetOutputFileName (const int n, const std::string &fname) |
| Sets (or overrides) the output filename. | |
| bool | SetOutputPath (const SGPath &path) |
| Set the directory where the output files will be written. | |
| void | SetPropertyValue (const std::string &property, double value) |
| Sets a property value. | |
| void | SetRootDir (const SGPath &rootDir) |
| Set the root directory that is used to obtain absolute paths from relative paths. | |
| double | Setsim_time (double cur_time) |
| Sets the current sim time. | |
| bool | SetSystemsPath (const SGPath &path) |
| Set the path to the systems config file directories. | |
| void | SetTrimMode (int mode) |
| void | SetTrimStatus (bool status) |
| int | SRand (void) const |
| void | SuspendIntegration (void) |
| Suspends the simulation and sets the delta T to zero. | |
| void | Unbind (void) |
| Unbind all tied JSBSim properties. | |
Top-level executive State and Model retrieval mechanism | |
Returns the FGAtmosphere pointer. | |
| std::shared_ptr< FGAtmosphere > | GetAtmosphere (void) const |
| std::shared_ptr< FGAccelerations > | GetAccelerations (void) const |
| Returns the FGAccelerations pointer. | |
| std::shared_ptr< FGWinds > | GetWinds (void) const |
| Returns the FGWinds pointer. | |
| std::shared_ptr< FGFCS > | GetFCS (void) const |
| Returns the FGFCS pointer. | |
| std::shared_ptr< FGPropulsion > | GetPropulsion (void) const |
| Returns the FGPropulsion pointer. | |
| std::shared_ptr< FGMassBalance > | GetMassBalance (void) const |
| Returns the FGAircraft pointer. | |
| std::shared_ptr< FGAerodynamics > | GetAerodynamics (void) const |
| Returns the FGAerodynamics pointer. | |
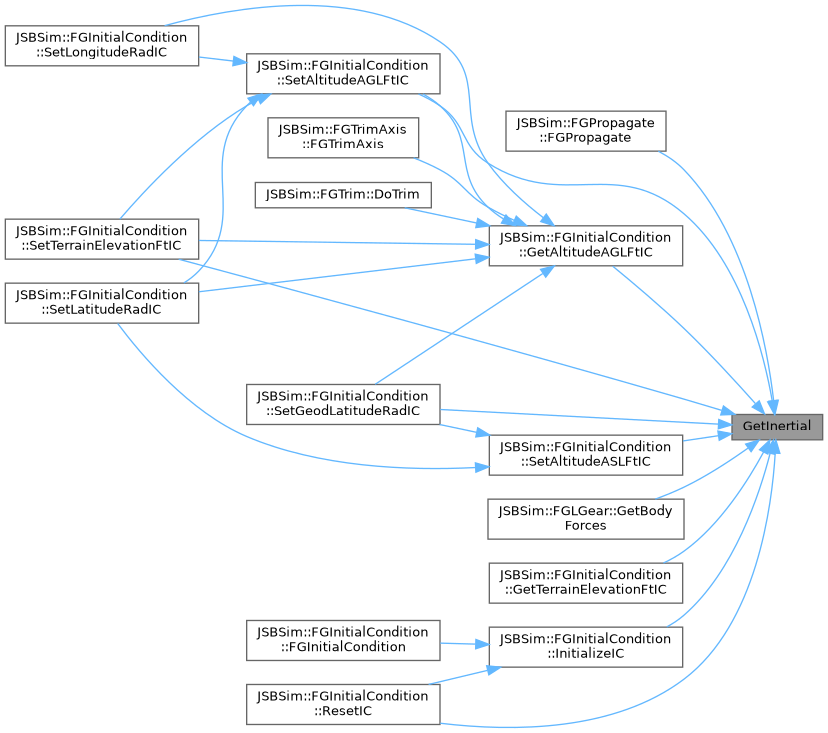
| std::shared_ptr< FGInertial > | GetInertial (void) const |
| Returns the FGInertial pointer. | |
| std::shared_ptr< FGGroundReactions > | GetGroundReactions (void) const |
| Returns the FGGroundReactions pointer. | |
| std::shared_ptr< FGExternalReactions > | GetExternalReactions (void) const |
| Returns the FGExternalReactions pointer. | |
| std::shared_ptr< FGBuoyantForces > | GetBuoyantForces (void) const |
| Returns the FGBuoyantForces pointer. | |
| std::shared_ptr< FGAircraft > | GetAircraft (void) const |
| Returns the FGAircraft pointer. | |
| std::shared_ptr< FGPropagate > | GetPropagate (void) const |
| Returns the FGPropagate pointer. | |
| std::shared_ptr< FGAuxiliary > | GetAuxiliary (void) const |
| Returns the FGAuxiliary pointer. | |
| std::shared_ptr< FGInput > | GetInput (void) const |
| Returns the FGInput pointer. | |
| std::shared_ptr< FGOutput > | GetOutput (void) const |
| Returns the FGOutput pointer. | |
| std::shared_ptr< FGScript > | GetScript (void) const |
| Retrieves the script object. | |
| std::shared_ptr< FGInitialCondition > | GetIC (void) const |
| Returns a pointer to the FGInitialCondition object. | |
| std::shared_ptr< FGTrim > | GetTrim (void) |
| Returns a pointer to the FGTrim object. | |
| Public Member Functions inherited from FGJSBBase | |
| FGJSBBase () | |
| Constructor for FGJSBBase. | |
| virtual | ~FGJSBBase () |
| Destructor for FGJSBBase. | |
| void | disableHighLighting (void) |
| Disables highlighting in the console output. | |
Static Public Attributes | |
| static const int | DONT_EXECUTE_RUN_IC = 0x2 |
| static const int | START_NEW_OUTPUT = 0x1 |
| Mode flags for ResetToInitialConditions. | |
| Static Public Attributes inherited from FGJSBBase | |
| static char | highint [5] = {27, '[', '1', 'm', '\0' } |
| highlights text | |
| static char | halfint [5] = {27, '[', '2', 'm', '\0' } |
| low intensity text | |
| static char | normint [6] = {27, '[', '2', '2', 'm', '\0' } |
| normal intensity text | |
| static char | reset [5] = {27, '[', '0', 'm', '\0' } |
| resets text properties | |
| static char | underon [5] = {27, '[', '4', 'm', '\0' } |
| underlines text | |
| static char | underoff [6] = {27, '[', '2', '4', 'm', '\0' } |
| underline off | |
| static char | fgblue [6] = {27, '[', '3', '4', 'm', '\0' } |
| blue text | |
| static char | fgcyan [6] = {27, '[', '3', '6', 'm', '\0' } |
| cyan text | |
| static char | fgred [6] = {27, '[', '3', '1', 'm', '\0' } |
| red text | |
| static char | fggreen [6] = {27, '[', '3', '2', 'm', '\0' } |
| green text | |
| static char | fgdef [6] = {27, '[', '3', '9', 'm', '\0' } |
| default text | |
| static short | debug_lvl = 1 |
Additional Inherited Members | |
| Static Public Member Functions inherited from FGJSBBase | |
| static const std::string & | GetVersion (void) |
| Returns the version number of JSBSim. | |
| static constexpr double | KelvinToFahrenheit (double kelvin) |
| Converts from degrees Kelvin to degrees Fahrenheit. | |
| static constexpr double | CelsiusToRankine (double celsius) |
| Converts from degrees Celsius to degrees Rankine. | |
| static constexpr double | RankineToCelsius (double rankine) |
| Converts from degrees Rankine to degrees Celsius. | |
| static constexpr double | KelvinToRankine (double kelvin) |
| Converts from degrees Kelvin to degrees Rankine. | |
| static constexpr double | RankineToKelvin (double rankine) |
| Converts from degrees Rankine to degrees Kelvin. | |
| static constexpr double | FahrenheitToCelsius (double fahrenheit) |
| Converts from degrees Fahrenheit to degrees Celsius. | |
| static constexpr double | CelsiusToFahrenheit (double celsius) |
| Converts from degrees Celsius to degrees Fahrenheit. | |
| static constexpr double | CelsiusToKelvin (double celsius) |
| Converts from degrees Celsius to degrees Kelvin. | |
| static constexpr double | KelvinToCelsius (double kelvin) |
| Converts from degrees Kelvin to degrees Celsius. | |
| static constexpr double | FeetToMeters (double measure) |
| Converts from feet to meters. | |
| static bool | EqualToRoundoff (double a, double b) |
| Finite precision comparison. | |
| static bool | EqualToRoundoff (float a, float b) |
| Finite precision comparison. | |
| static bool | EqualToRoundoff (float a, double b) |
| Finite precision comparison. | |
| static bool | EqualToRoundoff (double a, float b) |
| Finite precision comparison. | |
| static constexpr double | Constrain (double min, double value, double max) |
| Constrain a value between a minimum and a maximum value. | |
| static constexpr double | sign (double num) |
| Static Protected Member Functions inherited from FGJSBBase | |
| static std::string | CreateIndexedPropertyName (const std::string &Property, int index) |
| Static Protected Attributes inherited from FGJSBBase | |
| static constexpr double | radtodeg = 180. / M_PI |
| static constexpr double | degtorad = M_PI / 180. |
| static constexpr double | hptoftlbssec = 550.0 |
| static constexpr double | psftoinhg = 0.014138 |
| static constexpr double | psftopa = 47.88 |
| static constexpr double | fttom = 0.3048 |
| static constexpr double | ktstofps = 1852./(3600*fttom) |
| static constexpr double | fpstokts = 1.0 / ktstofps |
| static constexpr double | inchtoft = 1.0/12.0 |
| static constexpr double | m3toft3 = 1.0/(fttom*fttom*fttom) |
| static constexpr double | in3tom3 = inchtoft*inchtoft*inchtoft/m3toft3 |
| static constexpr double | inhgtopa = 3386.38 |
| static constexpr double | slugtolb = 32.174049 |
| Note that definition of lbtoslug by the inverse of slugtolb and not to a different constant you can also get from some tables will make lbtoslug*slugtolb == 1 up to the magnitude of roundoff. | |
| static constexpr double | lbtoslug = 1.0/slugtolb |
| static constexpr double | kgtolb = 2.20462 |
| static constexpr double | kgtoslug = 0.06852168 |
| static const std::string | needed_cfg_version = "2.0" |
| static const std::string | JSBSim_version = JSBSIM_VERSION " " __DATE__ " " __TIME__ |
| enum eModels |
Definition at line 225 of file FGFDMExec.h.
| FGFDMExec | ( | FGPropertyManager * | root = nullptr, |
| std::shared_ptr< unsigned int > | fdmctr = nullptr |
||
| ) |
Default constructor.
Definition at line 80 of file FGFDMExec.cpp.
Here is the call graph for this function:| ~FGFDMExec | ( | ) |
Default destructor.
Definition at line 168 of file FGFDMExec.cpp.
Here is the call graph for this function:
|
inline |
Definition at line 627 of file FGFDMExec.h.
| void BuildPropertyCatalog | ( | struct PropertyCatalogStructure * | pcs | ) |
Builds a catalog of properties.
This function descends the property tree and creates a list (an STL vector) containing the name and node for all properties.
| pcs | The "root" property catalog structure pointer. |
Definition at line 1083 of file FGFDMExec.cpp.
Here is the call graph for this function: Here is the caller graph for this function:| void CheckIncrementalHold | ( | void | ) |
Checks if required to hold afer increment.
Definition at line 1306 of file FGFDMExec.cpp.
|
inline |
Disables input from all inputs.
Definition at line 489 of file FGFDMExec.h.
|
inline |
Disables data logging to all outputs.
Definition at line 485 of file FGFDMExec.h.
| void DoLinearization | ( | int | ) |
Executes linearization with state-space output You must trim first to get an accurate state-space model.
Definition at line 1351 of file FGFDMExec.cpp.
Here is the call graph for this function: Here is the caller graph for this function:| void DoTrim | ( | int | mode | ) |
Executes trimming in the selected mode.
| mode | Specifies how to trim:
|
Definition at line 1330 of file FGFDMExec.cpp.
Here is the caller graph for this function:
|
inline |
Turn on hold after increment.
Definition at line 495 of file FGFDMExec.h.
Here is the caller graph for this function:
|
inline |
Enables input from all inputs.
Definition at line 491 of file FGFDMExec.h.
|
inline |
Enables data logging to all outputs.
Definition at line 487 of file FGFDMExec.h.
| vector< string > EnumerateFDMs | ( | void | ) |
Returns a vector of strings representing the names of all loaded models (future)
Definition at line 717 of file FGFDMExec.cpp.
Here is the call graph for this function:
|
inline |
Forces the specified output object to print its items once.
Definition at line 451 of file FGFDMExec.h.
| std::shared_ptr< FGAccelerations > GetAccelerations | ( | void | ) | const |
Returns the FGAccelerations pointer.
Definition at line 367 of file FGFDMExec.cpp.
Here is the caller graph for this function:| std::shared_ptr< FGAerodynamics > GetAerodynamics | ( | void | ) | const |
Returns the FGAerodynamics pointer.
Definition at line 332 of file FGFDMExec.cpp.
Here is the caller graph for this function:| std::shared_ptr< FGAircraft > GetAircraft | ( | void | ) | const |
Returns the FGAircraft pointer.
Definition at line 360 of file FGFDMExec.cpp.
Here is the caller graph for this function:
|
inline |
Retrieves the aircraft path.
Definition at line 398 of file FGFDMExec.h.
| std::shared_ptr< FGAtmosphere > GetAtmosphere | ( | void | ) | const |
Definition at line 290 of file FGFDMExec.cpp.
| std::shared_ptr< FGAuxiliary > GetAuxiliary | ( | void | ) | const |
Returns the FGAuxiliary pointer.
Definition at line 318 of file FGFDMExec.cpp.
Here is the caller graph for this function:| std::shared_ptr< FGBuoyantForces > GetBuoyantForces | ( | void | ) | const |
Returns the FGBuoyantForces pointer.
Definition at line 353 of file FGFDMExec.cpp.
Here is the caller graph for this function:
|
inline |
Gets a particular child FDM.
Definition at line 428 of file FGFDMExec.h.
Here is the caller graph for this function:
|
inline |
Retrieves the current debug level setting.
Definition at line 606 of file FGFDMExec.h.
Here is the caller graph for this function:
|
inline |
Returns the simulation delta T.
Definition at line 557 of file FGFDMExec.h.
Here is the caller graph for this function:
|
inline |
| std::shared_ptr< FGExternalReactions > GetExternalReactions | ( | void | ) | const |
Returns the FGExternalReactions pointer.
Definition at line 346 of file FGFDMExec.cpp.
Here is the caller graph for this function:| std::shared_ptr< FGFCS > GetFCS | ( | void | ) | const |
Returns the FGFCS pointer.
Definition at line 304 of file FGFDMExec.cpp.
Here is the caller graph for this function:
|
inline |
Gets the number of child FDMs.
Definition at line 426 of file FGFDMExec.h.
Here is the caller graph for this function:
|
inline |
|
inline |
Retrieves the full aircraft path name.
Definition at line 402 of file FGFDMExec.h.
Here is the caller graph for this function:| std::shared_ptr< FGGroundReactions > GetGroundReactions | ( | void | ) | const |
Returns the FGGroundReactions pointer.
Definition at line 339 of file FGFDMExec.cpp.
Here is the caller graph for this function:
|
inline |
Gets the value of the property forces/hold-down.
Definition at line 621 of file FGFDMExec.h.
Here is the caller graph for this function:
|
inline |
Returns a pointer to the FGInitialCondition object.
Definition at line 390 of file FGFDMExec.h.
Here is the caller graph for this function:| std::shared_ptr< FGInertial > GetInertial | ( | void | ) | const |
Returns the FGInertial pointer.
Definition at line 276 of file FGFDMExec.cpp.
Here is the caller graph for this function:| std::shared_ptr< FGInput > GetInput | ( | void | ) | const |
Returns the FGInput pointer.
Definition at line 283 of file FGFDMExec.cpp.
Here is the caller graph for this function:| std::shared_ptr< FGMassBalance > GetMassBalance | ( | void | ) | const |
Returns the FGAircraft pointer.
Definition at line 311 of file FGFDMExec.cpp.
Here is the caller graph for this function:
|
inline |
| std::shared_ptr< FGOutput > GetOutput | ( | void | ) | const |
Returns the FGOutput pointer.
Definition at line 374 of file FGFDMExec.cpp.
Here is the caller graph for this function:
|
inline |
Retrieves the current output filename.
| n | index of file |
Definition at line 466 of file FGFDMExec.h.
|
inline |
Retrieves the path to the output files.
Definition at line 404 of file FGFDMExec.h.
Here is the caller graph for this function:| std::shared_ptr< FGPropagate > GetPropagate | ( | void | ) | const |
Returns the FGPropagate pointer.
Definition at line 269 of file FGFDMExec.cpp.
Here is the caller graph for this function:
|
inline |
Definition at line 544 of file FGFDMExec.h.
|
inline |
Returns a pointer to the property manager object.
Definition at line 422 of file FGFDMExec.h.
Here is the caller graph for this function:
|
inline |
Retrieves the value of a property.
| property | the name of the property |
Definition at line 409 of file FGFDMExec.h.
| std::shared_ptr< FGPropulsion > GetPropulsion | ( | void | ) | const |
Returns the FGPropulsion pointer.
Definition at line 325 of file FGFDMExec.cpp.
Here is the caller graph for this function:| string GetPropulsionTankReport | ( | ) | const |
Definition at line 1076 of file FGFDMExec.cpp.
|
inline |
Definition at line 631 of file FGFDMExec.h.
|
inline |
Retrieve the Root Directory.
Definition at line 595 of file FGFDMExec.h.
|
inline |
|
inline |
Returns the cumulative simulation time in seconds.
Definition at line 554 of file FGFDMExec.h.
Here is the caller graph for this function:
|
inline |
|
inline |
Definition at line 623 of file FGFDMExec.h.
| std::shared_ptr< FGTrim > GetTrim | ( | void | ) |
Returns a pointer to the FGTrim object.
Definition at line 1298 of file FGFDMExec.cpp.
|
inline |
Definition at line 549 of file FGFDMExec.h.
|
inline |
Definition at line 547 of file FGFDMExec.h.
| std::shared_ptr< FGWinds > GetWinds | ( | void | ) | const |
Returns the FGWinds pointer.
Definition at line 297 of file FGFDMExec.cpp.
Here is the caller graph for this function:
|
inline |
Pauses execution by preventing time from incrementing.
Definition at line 493 of file FGFDMExec.h.
Here is the caller graph for this function:
|
inline |
Returns true if the simulation is Holding (i.e. simulation time is not moving).
Definition at line 501 of file FGFDMExec.h.
| double IncrTime | ( | void | ) |
Increments the simulation time if not in Holding mode.
The Frame counter is also incremented.
Definition at line 193 of file FGFDMExec.cpp.
Here is the call graph for this function: Here is the caller graph for this function:| void Initialize | ( | const FGInitialCondition * | FGIC | ) |
Initializes the simulation with initial conditions.
| FGIC | The initial conditions that will be passed to the simulation. |
Definition at line 673 of file FGFDMExec.cpp.
Here is the call graph for this function: Here is the caller graph for this function:
|
inline |
Returns the simulation suspension state.
Definition at line 567 of file FGFDMExec.h.
Here is the caller graph for this function:| bool LoadModel | ( | const SGPath & | AircraftPath, |
| const SGPath & | EnginePath, | ||
| const SGPath & | SystemsPath, | ||
| const std::string & | model, | ||
| bool | addModelToPath = true |
||
| ) |
Loads an aircraft model.
| AircraftPath | path to the aircraft/ directory. For instance: "aircraft". Under aircraft, then, would be directories for various modeled aircraft such as C172/, x15/, etc. |
| EnginePath | path to the directory under which engine config files are kept, for instance "engine" |
| SystemsPath | path to the directory under which systems config files are kept, for instance "systems" |
| model | the name of the aircraft model itself. This file will be looked for in the directory specified in the AircraftPath variable, and in turn under the directory with the same name as the model. For instance: "aircraft/x15/x15.xml" |
| addModelToPath | set to true to add the model name to the AircraftPath, defaults to true |
Definition at line 816 of file FGFDMExec.cpp.
Here is the call graph for this function: Here is the caller graph for this function:| bool LoadModel | ( | const std::string & | model, |
| bool | addModelToPath = true |
||
| ) |
Loads an aircraft model.
The paths to the aircraft and engine config file directories must be set prior to calling this. See below.
| model | the name of the aircraft model itself. This file will be looked for in the directory specified in the AircraftPath variable, and in turn under the directory with the same name as the model. For instance: "aircraft/x15/x15.xml" |
| addModelToPath | set to true to add the model name to the AircraftPath, defaults to true |
Definition at line 829 of file FGFDMExec.cpp.
Here is the call graph for this function:| bool LoadPlanet | ( | const SGPath & | PlanetPath, |
| bool | useAircraftPath = true |
||
| ) |
Loads the planet.
Loads the definition of the planet on which the vehicle will evolve such as its radius, gravity or its atmosphere characteristics.
| PlanetPath | The name of a planet definition file |
| useAircraftPath | true if path is given relative to the aircraft path. |
Definition at line 739 of file FGFDMExec.cpp.
Here is the call graph for this function: Here is the caller graph for this function:| bool LoadScript | ( | const SGPath & | Script, |
| double | deltaT = 0.0, |
||
| const SGPath & | initfile = SGPath() |
||
| ) |
Load a script.
| Script | The full path name and file name for the script to be loaded. |
| deltaT | The simulation integration step size, if given. If no value is supplied then 0.0 is used and the value is expected to be supplied in the script file itself. |
| initfile | The initialization file that will override the initialization file specified in the script file. If no file name is given on the command line, the file specified in the script will be used. If an initialization file is not given in either place, an error will result. |
Definition at line 730 of file FGFDMExec.cpp.
| void PrintPropertyCatalog | ( | void | ) |
Definition at line 1125 of file FGFDMExec.cpp.
| void PrintSimulationConfiguration | ( | void | ) | const |
Definition at line 1137 of file FGFDMExec.cpp.
| string QueryPropertyCatalog | ( | const std::string & | check, |
| const std::string & | end_of_line = "\n" |
||
| ) |
Retrieves property or properties matching the supplied string.
A string is returned that contains a carriage return delimited list of all strings in the property catalog that matches the supplied check string.
| check | The string to search for in the property catalog. |
| end_of_line | End of line (CR+LF if needed for Windows). |
Definition at line 1113 of file FGFDMExec.cpp.
Here is the caller graph for this function:| void ResetToInitialConditions | ( | int | mode | ) |
Resets the initial conditions object and prepares the simulation to run again.
If the mode's first bit is set the output instances will take special actions such as closing the current output file and open a new one with a different name. If the second bit is set then RunIC() won't be executed, leaving it to the caller to call RunIC(), e.g. in case the caller wants to set some other state like control surface deflections which would've been reset.
| mode | Sets the reset mode. |
Definition at line 683 of file FGFDMExec.cpp.
Here is the call graph for this function: Here is the caller graph for this function:
|
inline |
Resumes execution from a "Hold".
Definition at line 499 of file FGFDMExec.h.
Here is the caller graph for this function:
|
inline |
Resumes the simulation by resetting delta T to the correct value.
Definition at line 563 of file FGFDMExec.h.
Here is the caller graph for this function:| bool Run | ( | void | ) |
This function executes each scheduled model in succession.
Definition at line 404 of file FGFDMExec.cpp.
Here is the call graph for this function: Here is the caller graph for this function:| bool RunIC | ( | void | ) |
Initializes the sim from the initial condition object and executes each scheduled model without integrating i.e.
dt=0.
Definition at line 634 of file FGFDMExec.cpp.
Here is the call graph for this function: Here is the caller graph for this function:
|
inline |
Set the path to the aircraft config file directories.
Under this path, then, would be directories for various modeled aircraft such as C172/, x15/, etc. Relative paths are taken from the root directory.
| path | path to the aircraft directory, for instance "aircraft". |
Definition at line 326 of file FGFDMExec.h.
|
inline |
Marks this instance of the Exec object as a "child" object.
Definition at line 430 of file FGFDMExec.h.
|
inline |
Sets the debug level.
Definition at line 514 of file FGFDMExec.h.
Here is the caller graph for this function:
|
inline |
Sets the integration time step for the simulation executive.
| delta_t | the time step in seconds. |
Definition at line 576 of file FGFDMExec.h.
Here is the caller graph for this function:
|
inline |
Set the path to the engine config file directories.
Relative paths are taken from the root directory.
| path | path to the directory under which engine config files are kept, for instance "engine". |
Definition at line 314 of file FGFDMExec.h.
| void SetHoldDown | ( | bool | hd | ) |
Sets the property forces/hold-down.
This allows to do hard 'hold-down' such as for rockets on a launch pad with engines ignited.
| hd | enables the 'hold-down' function if non-zero |
Definition at line 704 of file FGFDMExec.cpp.
Here is the call graph for this function: Here is the caller graph for this function:
|
inline |
Sets the logging rate in Hz for all output objects (if any).
Definition at line 454 of file FGFDMExec.h.
|
inline |
Sets the output (logging) mechanism for this run.
Calling this function passes the name of an output directives file to the FGOutput object associated with this run. The call to this function should be made prior to loading an aircraft model. This call results in an FGOutput object being built as the first Output object in the FDMExec-managed list of Output objects that may be created for an aircraft model. If this call is made after an aircraft model is loaded, there is no effect. Any Output objects added by the aircraft model itself (in an <output> element) will be added after this one. Care should be taken not to refer to the same file name. An output directives file contains an <output> </output> element, within which should be specified the parameters or parameter groups that should be logged.
| fname | the filename of an output directives file. |
Definition at line 447 of file FGFDMExec.h.
|
inline |
Sets (or overrides) the output filename.
| n | index of file |
| fname | the name of the file to output data to |
Definition at line 460 of file FGFDMExec.h.
|
inline |
Set the directory where the output files will be written.
Relative paths are taken from the root directory.
| path | path to the directory under which the output files will be written. |
Definition at line 348 of file FGFDMExec.h.
|
inline |
Sets a property value.
| property | the property to be set |
| value | the value to set the property to |
Definition at line 415 of file FGFDMExec.h.
|
inline |
Set the root directory that is used to obtain absolute paths from relative paths.
Aircraft, engine, systems and output paths are not updated by this method. You must call each methods (SetAircraftPath(), SetEnginePath(), etc.) individually if you need to update these paths as well.
| rootDir | the path to the root directory. |
Definition at line 590 of file FGFDMExec.h.
| double Setsim_time | ( | double | cur_time | ) |
Sets the current sim time.
| cur_time | the current time |
Definition at line 185 of file FGFDMExec.cpp.
Here is the call graph for this function: Here is the caller graph for this function:
|
inline |
Set the path to the systems config file directories.
Relative paths are taken from the root directory.
| path | path to the directory under which systems config files are kept, for instance "systems" |
Definition at line 337 of file FGFDMExec.h.
|
inline |
Definition at line 548 of file FGFDMExec.h.
|
inline |
Definition at line 546 of file FGFDMExec.h.
|
inline |
Definition at line 633 of file FGFDMExec.h.
|
inline |
Suspends the simulation and sets the delta T to zero.
Definition at line 560 of file FGFDMExec.h.
Here is the caller graph for this function:
|
inline |
Unbind all tied JSBSim properties.
Definition at line 244 of file FGFDMExec.h.
Here is the caller graph for this function:
|
static |
Definition at line 504 of file FGFDMExec.h.
|
static |
Mode flags for ResetToInitialConditions.
Definition at line 503 of file FGFDMExec.h.