|
JSBSim Flight Dynamics Model 1.3.1 (17 May 2026)
An Open Source Flight Dynamics and Control Software Library in C++
|
|
JSBSim Flight Dynamics Model 1.3.1 (17 May 2026)
An Open Source Flight Dynamics and Control Software Library in C++
|
Encapsulates the Flight Control System (FCS) functionality.
This class also encapsulates the identical "system" and "autopilot" capability. FGFCS owns and contains the list of FGFCSComponents that define a system or systems for the modeled aircraft. The config file for the aircraft contains a description of the control path that starts at an input or command and ends at an effector, e.g. an aerosurface. The FCS components which comprise the control laws for an axis are defined sequentially in the configuration file. For instance, for the X-15:
In the above case we can see the first few components of the pitch channel defined. The input to the first component (a summer), as can be seen in the "Pitch trim sum" component, is really the sum of two parameters: elevator command (from the stick - a pilot input), and pitch trim. The next component created is an aerosurface scale component - a type of gain (see the LoadFCS() method for insight on how the various types of components map into the actual component classes). This continues until the final component for an axis when the <output> element is usually used to specify where the output is supposed to go. See the individual components for more information on how they are mechanized.
Another option for the flight controls portion of the config file is that in addition to using the "NAME" attribute in,
one can also supply a filename:
In this case, the FCS would be read in from another file.
#include <FGFCS.h>
 Inheritance diagram for FGFCS: Collaboration diagram for FGFCS:
Inheritance diagram for FGFCS: Collaboration diagram for FGFCS:Public Member Functions | |
| FGFCS (FGFDMExec *) | |
| Constructor. | |
| ~FGFCS () override | |
| Destructor. | |
| bool | InitModel (void) override |
| bool | Run (bool Holding) override |
| Runs the Flight Controls model; called by the Executive Can pass in a value indicating if the executive is directing the simulation to Hold. | |
Pilot input command retrieval | |
| double | GetDaCmd (void) const |
| Gets the aileron command. | |
| double | GetDeCmd (void) const |
| Gets the elevator command. | |
| double | GetDrCmd (void) const |
| Gets the rudder command. | |
| double | GetDsCmd (void) const |
| Gets the steering command. | |
| double | GetDfCmd (void) const |
| Gets the flaps command. | |
| double | GetDsbCmd (void) const |
| Gets the speedbrake command. | |
| double | GetDspCmd (void) const |
| Gets the spoiler command. | |
| double | GetThrottleCmd (int engine) const |
| Gets the throttle command. | |
| const std::vector< double > & | GetThrottleCmd () const |
| double | GetMixtureCmd (int engine) const |
| Gets the mixture command. | |
| const std::vector< double > & | GetMixtureCmd () const |
| double | GetPropAdvanceCmd (int engine) const |
| Gets the prop pitch command. | |
| bool | GetFeatherCmd (int engine) const |
| Gets the prop feather command. | |
| double | GetPitchTrimCmd (void) const |
| Gets the pitch trim command. | |
| double | GetYawTrimCmd (void) const |
| Gets the rudder trim command. | |
| double | GetRollTrimCmd (void) const |
| Gets the aileron trim command. | |
| double | GetGearCmd (void) const |
| Get the gear extend/retract command. | |
Aerosurface position retrieval | |
| double | GetDaLPos (int form=ofRad) const |
| Gets the left aileron position. | |
| double | GetDaRPos (int form=ofRad) const |
| Gets the right aileron position. | |
| double | GetDePos (int form=ofRad) const |
| Gets the elevator position. | |
| double | GetDrPos (int form=ofRad) const |
| Gets the rudder position. | |
| double | GetDsbPos (int form=ofRad) const |
| Gets the speedbrake position. | |
| double | GetDspPos (int form=ofRad) const |
| Gets the spoiler position. | |
| double | GetDfPos (int form=ofRad) const |
| Gets the flaps position. | |
| double | GetThrottlePos (int engine) const |
| Gets the throttle position. | |
| const std::vector< double > & | GetThrottlePos () const |
| double | GetMixturePos (int engine) const |
| Gets the mixture position. | |
| const std::vector< double > & | GetMixturePos () const |
| double | GetGearPos (void) const |
| Gets the gear position (0 up, 1 down), defaults to down. | |
| double | GetTailhookPos (void) const |
| Gets the tailhook position (0 up, 1 down) | |
| double | GetWingFoldPos (void) const |
| Gets the wing fold position (0 unfolded, 1 folded) | |
| double | GetPropAdvance (int engine) const |
| Gets the prop pitch position. | |
| const std::vector< double > & | GetPropAdvance () const |
| bool | GetPropFeather (int engine) const |
| Gets the prop feather position. | |
| const std::vector< bool > & | GetPropFeather () const |
| std::string | GetComponentStrings (const std::string &delimiter) const |
| Retrieves all component names for inclusion in output stream. | |
| std::string | GetComponentValues (const std::string &delimiter) const |
| Retrieves all component outputs for inclusion in output stream. | |
Pilot input command setting | |
| void | SetDaCmd (double cmd) |
| Sets the aileron command. | |
| void | SetDeCmd (double cmd) |
| Sets the elevator command. | |
| void | SetDrCmd (double cmd) |
| Sets the rudder command. | |
| void | SetDsCmd (double cmd) |
| Sets the steering command. | |
| void | SetDfCmd (double cmd) |
| Sets the flaps command. | |
| void | SetDsbCmd (double cmd) |
| Sets the speedbrake command. | |
| void | SetDspCmd (double cmd) |
| Sets the spoilers command. | |
| void | SetPitchTrimCmd (double cmd) |
| Sets the pitch trim command. | |
| void | SetYawTrimCmd (double cmd) |
| Sets the rudder trim command. | |
| void | SetRollTrimCmd (double cmd) |
| Sets the aileron trim command. | |
| void | SetThrottleCmd (int engine, double cmd) |
| Sets the throttle command for the specified engine. | |
| void | SetMixtureCmd (int engine, double cmd) |
| Sets the mixture command for the specified engine. | |
| void | SetGearCmd (double gearcmd) |
| Set the gear extend/retract command, defaults to down. | |
| void | SetPropAdvanceCmd (int engine, double cmd) |
| Sets the propeller pitch command for the specified engine. | |
| void | SetFeatherCmd (int engine, bool cmd) |
| Sets the propeller feather command for the specified engine. | |
Aerosurface position setting | |
| void | SetDaLPos (int form, double pos) |
| Sets the left aileron position. | |
| void | SetDaRPos (int form, double pos) |
| Sets the right aileron position. | |
| void | SetDePos (int form, double pos) |
| Sets the elevator position. | |
| void | SetDrPos (int form, double pos) |
| Sets the rudder position. | |
| void | SetDfPos (int form, double pos) |
| Sets the flaps position. | |
| void | SetDsbPos (int form, double pos) |
| Sets the speedbrake position. | |
| void | SetDspPos (int form, double pos) |
| Sets the spoiler position. | |
| void | SetThrottlePos (int engine, double cmd) |
| Sets the actual throttle setting for the specified engine. | |
| void | SetMixturePos (int engine, double cmd) |
| Sets the actual mixture setting for the specified engine. | |
| void | SetGearPos (double gearpos) |
| Set the gear extend/retract position, defaults to down. | |
| void | SetTailhookPos (double hookpos) |
| Set the tailhook position. | |
| void | SetWingFoldPos (double foldpos) |
| Set the wing fold position. | |
| void | SetPropAdvance (int engine, double cmd) |
| Sets the actual prop pitch setting for the specified engine. | |
| void | SetPropFeather (int engine, bool cmd) |
| Sets the actual prop feather setting for the specified engine. | |
| Public Member Functions inherited from FGModel | |
| FGModel (FGFDMExec *) | |
| Constructor. | |
| ~FGModel () override | |
| Destructor. | |
| FGFDMExec * | GetExec (void) const |
| const std::string & | GetName (void) const |
| unsigned int | GetRate (void) const |
| Get the output rate for the model in frames. | |
| bool | InitModel (void) override |
| void | SetPropertyManager (std::shared_ptr< FGPropertyManager > fgpm) |
| void | SetRate (unsigned int tt) |
| Set the ouput rate for the model in frames. | |
| Public Member Functions inherited from FGModelFunctions | |
| std::string | GetFunctionStrings (const std::string &delimeter) const |
| Gets the strings for the current set of functions. | |
| std::string | GetFunctionValues (const std::string &delimeter) const |
| Gets the function values. | |
| std::shared_ptr< FGFunction > | GetPreFunction (const std::string &name) |
| Get one of the "pre" function. | |
| bool | Load (Element *el, FGFDMExec *fdmex, std::string prefix="") |
| void | PostLoad (Element *el, FGFDMExec *fdmex, std::string prefix="") |
| void | PreLoad (Element *el, FGFDMExec *fdmex, std::string prefix="") |
| void | RunPostFunctions (void) |
| void | RunPreFunctions (void) |
| Public Member Functions inherited from FGJSBBase | |
| FGJSBBase () | |
| Constructor for FGJSBBase. | |
| virtual | ~FGJSBBase () |
| Destructor for FGJSBBase. | |
| void | disableHighLighting (void) |
| Disables highlighting in the console output. | |
Landing Gear brakes | |
| enum | SystemType { stFCS , stSystem , stAutoPilot } |
| void | SetLBrake (double cmd) |
| Sets the left brake group. | |
| void | SetRBrake (double cmd) |
| Sets the right brake group. | |
| void | SetCBrake (double cmd) |
| Sets the center brake group. | |
| double | GetBrake (FGLGear::BrakeGroup bg) |
| Gets the brake for a specified group. | |
| const std::vector< double > & | GetBrakePos () const |
| double | GetLBrake (void) const |
| Gets the left brake. | |
| double | GetRBrake (void) const |
| Gets the right brake. | |
| double | GetCBrake (void) const |
| Gets the center brake. | |
| bool | Load (Element *el) override |
| Loads the Flight Control System. | |
| SGPath | FindFullPathName (const SGPath &path) const override |
| void | AddThrottle (void) |
| double | GetDt (void) const |
| std::shared_ptr< FGPropertyManager > | GetPropertyManager (void) |
| bool | GetTrimStatus (void) const |
| double | GetChannelDeltaT (void) const |
Additional Inherited Members | |
| Public Types inherited from FGJSBBase | |
| enum | { eL = 1 , eM , eN } |
| Moments L, M, N. More... | |
| enum | { eP = 1 , eQ , eR } |
| Rates P, Q, R. More... | |
| enum | { eU = 1 , eV , eW } |
| Velocities U, V, W. More... | |
| enum | { eX = 1 , eY , eZ } |
| Positions X, Y, Z. More... | |
| enum | { ePhi = 1 , eTht , ePsi } |
| Euler angles Phi, Theta, Psi. More... | |
| enum | { eDrag = 1 , eSide , eLift } |
| Stability axis forces, Drag, Side force, Lift. More... | |
| enum | { eRoll = 1 , ePitch , eYaw } |
| Local frame orientation Roll, Pitch, Yaw. More... | |
| enum | { eNorth = 1 , eEast , eDown } |
| Local frame position North, East, Down. More... | |
| enum | { eLat = 1 , eLong , eRad } |
| Locations Radius, Latitude, Longitude. More... | |
| enum | { inNone = 0 , inDegrees , inRadians , inMeters , inFeet } |
| Conversion specifiers. More... | |
| Static Public Member Functions inherited from FGJSBBase | |
| static const std::string & | GetVersion (void) |
| Returns the version number of JSBSim. | |
| static constexpr double | KelvinToFahrenheit (double kelvin) |
| Converts from degrees Kelvin to degrees Fahrenheit. | |
| static constexpr double | CelsiusToRankine (double celsius) |
| Converts from degrees Celsius to degrees Rankine. | |
| static constexpr double | RankineToCelsius (double rankine) |
| Converts from degrees Rankine to degrees Celsius. | |
| static constexpr double | KelvinToRankine (double kelvin) |
| Converts from degrees Kelvin to degrees Rankine. | |
| static constexpr double | RankineToKelvin (double rankine) |
| Converts from degrees Rankine to degrees Kelvin. | |
| static constexpr double | FahrenheitToCelsius (double fahrenheit) |
| Converts from degrees Fahrenheit to degrees Celsius. | |
| static constexpr double | CelsiusToFahrenheit (double celsius) |
| Converts from degrees Celsius to degrees Fahrenheit. | |
| static constexpr double | CelsiusToKelvin (double celsius) |
| Converts from degrees Celsius to degrees Kelvin. | |
| static constexpr double | KelvinToCelsius (double kelvin) |
| Converts from degrees Kelvin to degrees Celsius. | |
| static constexpr double | FeetToMeters (double measure) |
| Converts from feet to meters. | |
| static bool | EqualToRoundoff (double a, double b) |
| Finite precision comparison. | |
| static bool | EqualToRoundoff (float a, float b) |
| Finite precision comparison. | |
| static bool | EqualToRoundoff (float a, double b) |
| Finite precision comparison. | |
| static bool | EqualToRoundoff (double a, float b) |
| Finite precision comparison. | |
| static constexpr double | Constrain (double min, double value, double max) |
| Constrain a value between a minimum and a maximum value. | |
| static constexpr double | sign (double num) |
| Static Public Attributes inherited from FGJSBBase | |
| static char | highint [5] = {27, '[', '1', 'm', '\0' } |
| highlights text | |
| static char | halfint [5] = {27, '[', '2', 'm', '\0' } |
| low intensity text | |
| static char | normint [6] = {27, '[', '2', '2', 'm', '\0' } |
| normal intensity text | |
| static char | reset [5] = {27, '[', '0', 'm', '\0' } |
| resets text properties | |
| static char | underon [5] = {27, '[', '4', 'm', '\0' } |
| underlines text | |
| static char | underoff [6] = {27, '[', '2', '4', 'm', '\0' } |
| underline off | |
| static char | fgblue [6] = {27, '[', '3', '4', 'm', '\0' } |
| blue text | |
| static char | fgcyan [6] = {27, '[', '3', '6', 'm', '\0' } |
| cyan text | |
| static char | fgred [6] = {27, '[', '3', '1', 'm', '\0' } |
| red text | |
| static char | fggreen [6] = {27, '[', '3', '2', 'm', '\0' } |
| green text | |
| static char | fgdef [6] = {27, '[', '3', '9', 'm', '\0' } |
| default text | |
| static short | debug_lvl = 1 |
| Protected Member Functions inherited from FGModel | |
| bool | Upload (Element *el, bool preLoad) |
| Uploads this model in memory. | |
| Static Protected Member Functions inherited from FGJSBBase | |
| static std::string | CreateIndexedPropertyName (const std::string &Property, int index) |
| Protected Attributes inherited from FGModel | |
| unsigned int | exe_ctr |
| FGFDMExec * | FDMExec |
| std::string | Name |
| std::shared_ptr< FGPropertyManager > | PropertyManager |
| unsigned int | rate |
| Protected Attributes inherited from FGModelFunctions | |
| FGPropertyReader | LocalProperties |
| std::vector< std::shared_ptr< FGFunction > > | PostFunctions |
| std::vector< std::shared_ptr< FGFunction > > | PreFunctions |
| Static Protected Attributes inherited from FGJSBBase | |
| static constexpr double | radtodeg = 180. / M_PI |
| static constexpr double | degtorad = M_PI / 180. |
| static constexpr double | hptoftlbssec = 550.0 |
| static constexpr double | psftoinhg = 0.014138 |
| static constexpr double | psftopa = 47.88 |
| static constexpr double | fttom = 0.3048 |
| static constexpr double | ktstofps = 1852./(3600*fttom) |
| static constexpr double | fpstokts = 1.0 / ktstofps |
| static constexpr double | inchtoft = 1.0/12.0 |
| static constexpr double | m3toft3 = 1.0/(fttom*fttom*fttom) |
| static constexpr double | in3tom3 = inchtoft*inchtoft*inchtoft/m3toft3 |
| static constexpr double | inhgtopa = 3386.38 |
| static constexpr double | slugtolb = 32.174049 |
| Note that definition of lbtoslug by the inverse of slugtolb and not to a different constant you can also get from some tables will make lbtoslug*slugtolb == 1 up to the magnitude of roundoff. | |
| static constexpr double | lbtoslug = 1.0/slugtolb |
| static constexpr double | kgtolb = 2.20462 |
| static constexpr double | kgtoslug = 0.06852168 |
| static const std::string | needed_cfg_version = "2.0" |
| static const std::string | JSBSim_version = JSBSIM_VERSION " " __DATE__ " " __TIME__ |
Constructor.
| Executive | a pointer to the parent executive object |
Definition at line 74 of file FGFCS.cpp.
|
override |
Destructor.
Definition at line 97 of file FGFCS.cpp.
| void AddThrottle | ( | void | ) |
Definition at line 696 of file FGFCS.cpp.
|
overridevirtual |
Reimplemented from FGModel.
Definition at line 627 of file FGFCS.cpp.
| double GetBrake | ( | FGLGear::BrakeGroup | bg | ) |
|
inline |
|
inline |
|
inline |
| string GetComponentStrings | ( | const std::string & | delimiter | ) | const |
Retrieves all component names for inclusion in output stream.
| delimiter | either a tab or comma string depending on output type |
Definition at line 649 of file FGFCS.cpp.
| string GetComponentValues | ( | const std::string & | delimiter | ) | const |
Retrieves all component outputs for inclusion in output stream.
| delimiter | either a tab or comma string depending on output type |
Definition at line 672 of file FGFCS.cpp.
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
Gets the steering command.
Definition at line 225 of file FGFCS.h.
Here is the call graph for this function:
|
inline |
|
inline |
| double GetDt | ( | void | ) | const |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
Gets the mixture command.
| engine | engine ID number |
Definition at line 253 of file FGFCS.h.
|
inline |
|
inline |
Gets the mixture position.
| engine | engine ID number |
Definition at line 336 of file FGFCS.h.
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
| double GetThrottleCmd | ( | int | engine | ) | const |
Gets the throttle command.
| engine | engine ID number |
Definition at line 357 of file FGFCS.cpp.
|
inline |
| double GetThrottlePos | ( | int | engine | ) | const |
Gets the throttle position.
| engine | engine ID number |
Definition at line 377 of file FGFCS.cpp.
|
inline |
|
inline |
|
inline |
|
overridevirtual |
Reimplemented from FGModelFunctions.
Definition at line 118 of file FGFCS.cpp.
|
overridevirtual |
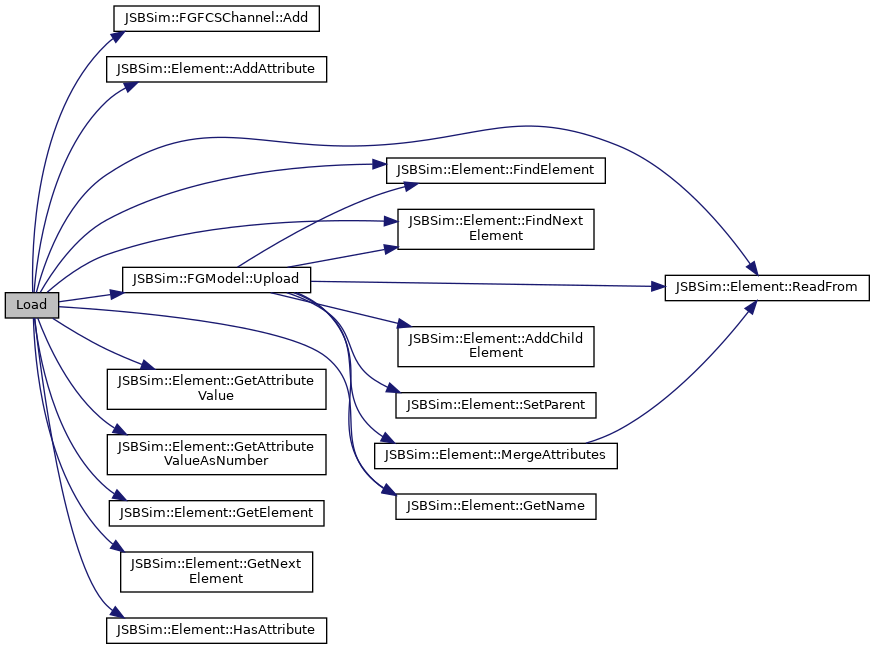
Loads the Flight Control System.
Load() is called from FGFDMExec.
| el | pointer to the Element instance |
Reimplemented from FGModel.
Definition at line 481 of file FGFCS.cpp.
Here is the call graph for this function:
|
overridevirtual |
Runs the Flight Controls model; called by the Executive Can pass in a value indicating if the executive is directing the simulation to Hold.
| Holding | if true, the executive has been directed to hold the sim from advancing time. Some models may ignore this flag, such as the Input model, which may need to be active to listen on a socket for the "Resume" command to be given. |
Reimplemented from FGModel.
Definition at line 154 of file FGFCS.cpp.
Here is the call graph for this function:
|
inline |
|
inline |
| void SetDaLPos | ( | int | form, |
| double | pos | ||
| ) |
Sets the left aileron position.
| cmd | left aileron position in radians |
Definition at line 186 of file FGFCS.cpp.
| void SetDaRPos | ( | int | form, |
| double | pos | ||
| ) |
Sets the right aileron position.
| cmd | right aileron position in radians |
Definition at line 205 of file FGFCS.cpp.
|
inline |
| void SetDePos | ( | int | form, |
| double | pos | ||
| ) |
Sets the elevator position.
| cmd | elevator position in radians |
Definition at line 224 of file FGFCS.cpp.
|
inline |
| void SetDfPos | ( | int | form, |
| double | pos | ||
| ) |
Sets the flaps position.
| cmd | flaps position in radians |
Definition at line 262 of file FGFCS.cpp.
|
inline |
| void SetDrPos | ( | int | form, |
| double | pos | ||
| ) |
Sets the rudder position.
| cmd | rudder position in radians |
Definition at line 243 of file FGFCS.cpp.
|
inline |
| void SetDsbPos | ( | int | form, |
| double | pos | ||
| ) |
Sets the speedbrake position.
| cmd | speedbrake position in radians |
Definition at line 281 of file FGFCS.cpp.
|
inline |
Sets the steering command.
| cmd | steering command in percent |
Definition at line 394 of file FGFCS.h.
Here is the call graph for this function:
|
inline |
| void SetDspPos | ( | int | form, |
| double | pos | ||
| ) |
Sets the spoiler position.
| cmd | spoiler position in radians |
Definition at line 300 of file FGFCS.cpp.
| void SetFeatherCmd | ( | int | engine, |
| bool | cmd | ||
| ) |
Sets the propeller feather command for the specified engine.
| engine | engine ID number |
| cmd | feather (bool) |
Definition at line 453 of file FGFCS.cpp.
|
inline |
|
inline |
|
inline |
| void SetMixtureCmd | ( | int | engine, |
| double | cmd | ||
| ) |
Sets the mixture command for the specified engine.
| engine | engine ID number |
| cmd | normalized mixture command |
Definition at line 397 of file FGFCS.cpp.
| void SetMixturePos | ( | int | engine, |
| double | cmd | ||
| ) |
Sets the actual mixture setting for the specified engine.
| engine | engine ID number |
| cmd | normalized mixture setting |
Definition at line 411 of file FGFCS.cpp.
|
inline |
| void SetPropAdvance | ( | int | engine, |
| double | cmd | ||
| ) |
Sets the actual prop pitch setting for the specified engine.
| engine | engine ID number |
| cmd | prop pitch setting in percent (0.0 - 1.0) |
Definition at line 439 of file FGFCS.cpp.
| void SetPropAdvanceCmd | ( | int | engine, |
| double | cmd | ||
| ) |
Sets the propeller pitch command for the specified engine.
| engine | engine ID number |
| cmd | pitch command in percent (0.0 - 1.0) |
Definition at line 425 of file FGFCS.cpp.
| void SetPropFeather | ( | int | engine, |
| bool | cmd | ||
| ) |
Sets the actual prop feather setting for the specified engine.
| engine | engine ID number |
| cmd | prop fether setting (bool) |
Definition at line 467 of file FGFCS.cpp.
|
inline |
|
inline |
|
inline |
| void SetThrottleCmd | ( | int | engine, |
| double | cmd | ||
| ) |
Sets the throttle command for the specified engine.
| engine | engine ID number |
| cmd | normalized throttle command (0.0 - 1.0) |
Definition at line 319 of file FGFCS.cpp.
| void SetThrottlePos | ( | int | engine, |
| double | cmd | ||
| ) |
Sets the actual throttle setting for the specified engine.
| engine | engine ID number |
| cmd | normalized throttle setting (0.0 - 1.0) |
Definition at line 338 of file FGFCS.cpp.
|
inline |
|
inline |